In the Computational Robotics Lab we seek to deeply understand and to rigorously address the computational challenges that arise when planning for robots. Our research, lying at the intersection of Computer Science and Robotics, is motivated by the key insight that in order to address these challenges, traditional Computer Science algorithms, tools and paradigms need to be revisited. This requires both (i) understanding and analyzing the unique domain-specific computational challenges in robotic planning and (ii) developing algorithms to address these challenges to provide the robotics community foundational tools to solve real-world problems.
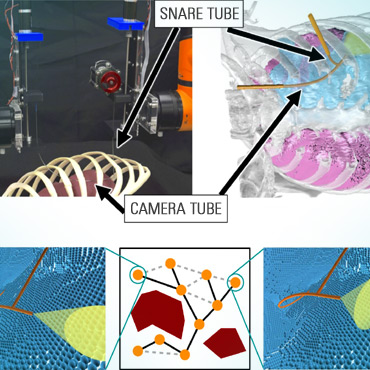
A recent talk I gave at the UW robotics seminar describing the work we are doing on planning for continuum robots can be found here.