The Computational Robotics Lab is a center for foundational research on the computational challenges that arise when planning for robots.
We focus primarily on complex robotic systems such as those that arise in medical applications and warehouse domains.
For such settings, we analyze the domain-specific computational challenges and, subsequently develop algorithms to address these challenges to provide the robotics community foundational tools to solve real-world problems.
This is done by developing and adapting tools from diverse disciplines such as computational geometry, probability theory and machine learning and has led to a deep theoretical understanding of robot motion-planning and to the development of efficient algorithms and data structures applicable to real-world planning problems.
In this course we study different aspects of algorithmic motion planning. We will cover the fundamentals of robot motion planning (configurations spaces, exact methods for low-dimensional systems) and then study more practical approaches for high-dimensional systems (sampling-based methods, search-based methods and more).
The 2020 Technion Robotics Seminar, co-organized with Vadim Indelman, Erez Karpas, Aviv Tamar and Amir Degani, was a campus-wide seminar, aimed at everyone who is interested in robotics.
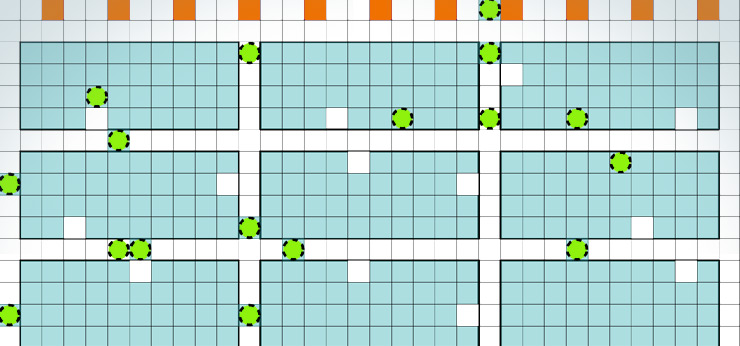
In this seminar we study recent advancements in Multi Agent Path Finding (MAPF) – The problem of coordinating the movement of a fleet of agents or robots. This decades-old family of problems, which has been intensively studied by the robotics and AI communities, has applications in diverse settings including assembly, evacuation, micro-droplet manipulation and search-and-rescue.
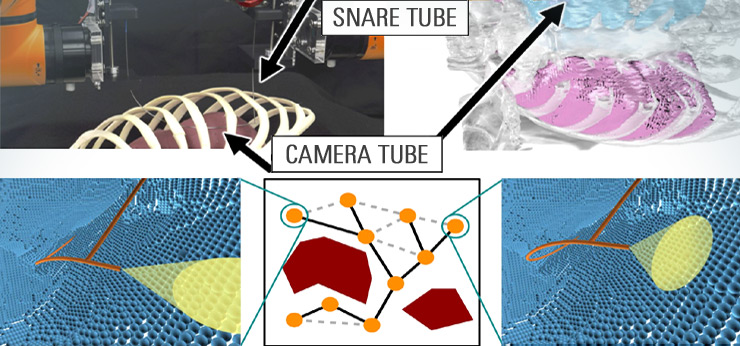
In this course we study different aspects of algorithmic motion planning. We will cover the fundamentals of robot motion planning (configurations spaces, exact methods for low-dimensional systems) and then study more practical approaches for high-dimensional systems (sampling-based methods, search-based methods and more). Finally, we will see how these methods are used in different robotic applications such as minimally-invasive medical devices.